





目前,,“驢子”(Donkey)是以色列通用機器人有限公司正在研發(fā)的一款無人駕駛地面車輛,預計在2017年中期完成研制,。其合同商為通用機器人有限公司,。

“驢子”原型樣機
“驢子”是一款輕量級4×4多用途可折疊機器人平臺,用于在戰(zhàn)場進行快速部署。通用機器人有限公司宣稱該裝備可以像擔架一樣展開,且可在30秒內(nèi)進行部署,。“驢子”可以攜帶超過70千克的重量,,行駛速度可達到16千米/小時,。其每一個車輪都有電動靜音傳動裝置,內(nèi)嵌有指定的噪聲強度,。該裝備由堅固的手持式松下“游俠”觸摸板操作控制裝置進行操控。其用戶界面配置可以為顯示器提供攝像機的實時視頻/圖像,,以及一系列驅(qū)動能力,,包括:航路點導航和跟隨領導者。按照預期,,“驢子”將被用于許多應用領域,,包括:清道、簡易爆炸裝置的檢測與中和,,以及后勤和遠程監(jiān)測,。
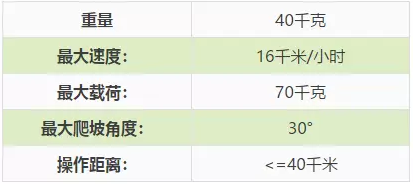
“驢子”規(guī)格
截至2016年,原型樣機,。
Sera Ingénierie公司研發(fā)的基礎款“Robbox”多用途戰(zhàn)術機器人(Multi-purpose Tactical Robot,,MTR)可用于多種任務,例如:觀察,、巡邏和后勤保障,。該公司正在與奈克斯特(Nexter)機器人公司合作,進一步將“Robbox”研發(fā)為后勤保障車輛,,即“騾子”(Mule),,后者也將擁有一個武裝變型車。Sera Ingénierie公司負責“Robbox”底座,,而奈克斯特公司則提供機器人智能,。該裝備由支持雙重創(chuàng)新保障制度(régime d'appui à l'innovation duale,RAPID)計劃的法國武器裝備總署(direction générale de l'armement,,DGA)提供資金保障,。其合同商為位于維勒邦伊夫特河畔的Sera Ingénierie公司和位于凡爾賽的奈克斯特機器人公司。

奈克斯特公司的“騾子”裝配“Robbox”底盤
“Robbox”的4X4驅(qū)動底盤由兩個獨立的單獨驅(qū)動前后輪組成,,以及一個中央連接機箱來支撐傳感器或載重,。這種高速與前后雙車軸轉(zhuǎn)向的結(jié)合,,在開放的城市環(huán)境中提供了極好的機動性。
“Robbox”可以由電池,、柴油或混合系統(tǒng)驅(qū)動,,且可以在戰(zhàn)場上為電池充電。兩個車載動力組提升了“Robbox”的整體性能,,并在混合配置下運行時,,在長距離中保持低噪音。該動力模塊在配置改變維修時可以被輕松替換,。
奈克斯特公司的“騾子”被設計用于后勤和運輸,。該裝備可以利用航路點或道路記錄與重放導航進行半自主運行,自動掃描區(qū)域,、自主領會任務,、自動返回原始位置或進行人員跟隨。激光掃描儀提供車載障礙物的檢測與規(guī)避,,讓其擁有安全的自主能力,。
“騾子”無人駕駛地面車輛可以用頂部和底部車廂來攜帶貨物。其頂部和底部各自可承載的最大重量為300千克,。根據(jù)設計,,該裝備可以裝載多種貨物,包括:食物,、彈藥,、水、燃油和電池等,。它能夠支援和再補給一個或多個班或排(多達10名士兵),。
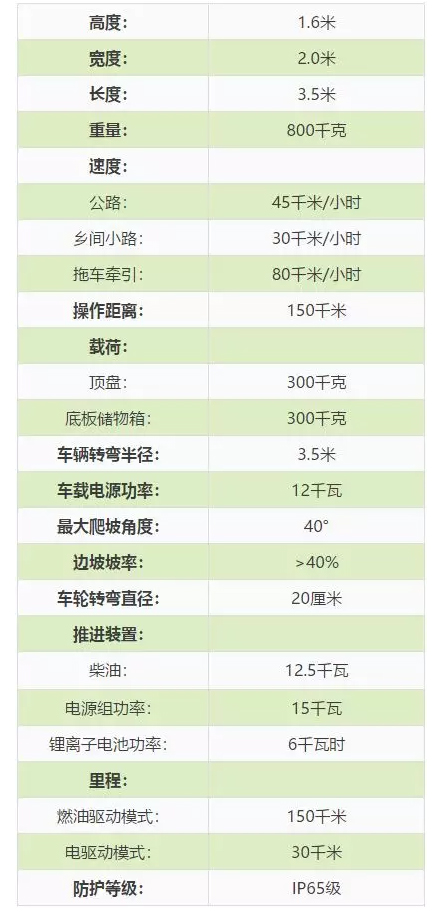
“Robbox”/“騾子”規(guī)格
“騾子”裝配了6臺攝像機來提供態(tài)勢感知,并配備了全球定位系統(tǒng),、照明設備和麥克風,。“Robbox”的底盤可以裝配紅外捕捉器(與歐洲導彈集團合作),。該裝備可通過兩個人機界面(human machine interfaces,,HMI)操控,車載人機界面(加固計算機)或手持人機界面(平板電腦和智能手機)均可,。其顯示器經(jīng)過設置可以同時顯示4臺攝像機的畫面,。
截至2017年,已研發(fā)完成且準備生產(chǎn),。
具有關節(jié)機械腿的柔性四足機器人“StarlETH”由蘇黎世聯(lián)邦理工學院(又名瑞士聯(lián)邦理工學院)的自主系統(tǒng)實驗室研發(fā),。目前,“StarlETH”已被用于進行運動研究,但是,,一旦完成研發(fā),,可用于檢查工業(yè)環(huán)境、炸彈處理,、搜索與救援(Search and Rescue,,SAR)任務和排雷。其合同商為蘇黎世聯(lián)邦理工學院機器人系統(tǒng)實驗室,。
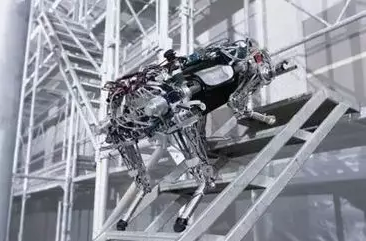
“StarlETH”展示其攀爬能力
“StarlETH”是具有12個自由度的四足驅(qū)動平臺(每條機械腿共有3個自由度),,由串聯(lián)彈性制動器驅(qū)動。各個自由度用于髖關節(jié)外展/內(nèi)收,,髖關節(jié)的屈曲/伸展以及膝關節(jié)屈曲/伸展,。其機械腿的設計(集成彈簧)模仿了肌肉如何儲存和釋放能量。執(zhí)行器使系統(tǒng)轉(zhuǎn)矩可控,,也適用于進行高度復雜的動態(tài)機動動作,。在最新版本中,“StarlETH”機器人可以通過車載能源供應和計算,,能夠執(zhí)行動態(tài)行走和小跑等動作,。它的大小相當于一條狗,重量為25千克,。“StarlETH”的主體由碳纖維夾層硬殼構(gòu)建,,以及鋁制的前后連接器,。其所有電子部件都通過主動式空氣環(huán)流進行冷卻。
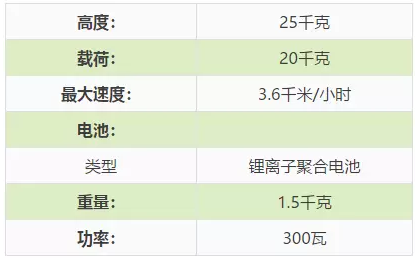
“StarlETH”規(guī)格
“StarlETH”使用電動機驅(qū)動,,經(jīng)測試其越障跑的速度大約為2.52千米/小時,。該裝備由重量為1.5千克的鋰離子聚合電池供電。它裝配了將近50個傳感器,,既可以自主運行也可以進行遙控,。其最大速度可以達到3.6千米/小時?!癝tarlETH”裝配了戰(zhàn)術腳傳感器,,以及車載慣性測量裝置、三臺電腦,、激光傳感器和照相機(都用于感知周邊環(huán)境),。
截至2017年,原型樣機,。其研究仍在進行中,。















 602030鋰電池300毫安3.7...
602030鋰電池300毫安3.7... 
















 京公網(wǎng)安備 11011202001879號
京公網(wǎng)安備 11011202001879號