





日前,,由解放軍陸軍裝備部主辦的“跨越險(xiǎn)阻2016”地面無(wú)人系統(tǒng)挑戰(zhàn)賽落下帷幕,,由中國(guó)兵器工業(yè)集團(tuán)中國(guó)北方車輛研究所派出的8個(gè)車隊(duì)參加全部5個(gè)組別的比賽,其中“奔跑號(hào)”山地四足仿生移動(dòng)平臺(tái)(俗稱“大狗”)在比賽中發(fā)揮出色,,獲50米競(jìng)速和綜合越野第一名,。

“奔跑號(hào)”在比賽中
這次“跨越險(xiǎn)阻2016”比賽匯聚了我國(guó)多種無(wú)人越野平臺(tái),進(jìn)行了一場(chǎng)積極有序的對(duì)比競(jìng)賽,。比賽級(jí)別包括中型,、輕小型、輪式,、履式,、輪步式、四足仿生等等不同范圍,。比賽項(xiàng)目與場(chǎng)景包括野外戰(zhàn)場(chǎng),、城鎮(zhèn)戰(zhàn)場(chǎng)偵察搜索、越野輸送等等,,包括中國(guó)兵器工業(yè)集團(tuán),、中國(guó)科學(xué)院、國(guó)防科學(xué)技術(shù)大學(xué),、裝甲兵工程學(xué)院,、北京理工大學(xué)等44家知名院校、科研院所,、企業(yè)的73支車隊(duì)參加比賽,。

“奔跑號(hào)”爬坡
由于賽場(chǎng)連日大雨,比賽一度推遲,,泥濘不堪的道路給比賽帶來(lái)了前所未見的困難,,在這樣的環(huán)境下,集團(tuán)公司派出的多個(gè)無(wú)人平臺(tái)項(xiàng)目仍然表現(xiàn)不俗,,順利進(jìn)入決賽,,“奔跑號(hào)”山地四足仿生移動(dòng)平臺(tái)更是獲得50米競(jìng)速和綜合越野第一名。


集團(tuán)公司其他參賽裝備
四足步行機(jī)器人通常采用汽油發(fā)動(dòng)機(jī)作為動(dòng)力,通過(guò)復(fù)雜的液壓與電氣系統(tǒng),,驅(qū)動(dòng)四只帶有多個(gè)關(guān)節(jié)的機(jī)械腿,,以仿生形式行進(jìn)。行進(jìn)速度在5到11公里/小時(shí)之間,,甚至超過(guò)了人類步行速度,。
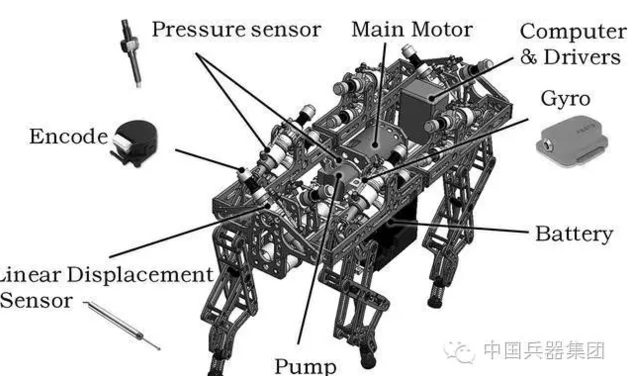
四足步行機(jī)器人示意圖
因?yàn)椴捎闷桶l(fā)動(dòng)機(jī),航程較遠(yuǎn),,且易于添加燃料,,機(jī)器人本身通過(guò)復(fù)雜的衛(wèi)星全球定位系統(tǒng)、光學(xué)雷達(dá),、雙目立體式觀測(cè)設(shè)備,、姿態(tài)感應(yīng)設(shè)備來(lái)判斷自身的運(yùn)動(dòng)姿態(tài),繞過(guò)障礙物,,在保持自身平衡的前提下向前行進(jìn),。還具備在失去平衡時(shí)自行糾正、甚至重新站起繼續(xù)行進(jìn)的能力,。機(jī)械腿帶有復(fù)雜的驅(qū)動(dòng)和減震設(shè)備,,它是四足步行機(jī)器人能逾越車輛無(wú)法通行的障礙的關(guān)鍵所在,也是它相對(duì)于無(wú)人駕駛車輛最大的優(yōu)點(diǎn),。
“奔跑號(hào)”的“跨越險(xiǎn)阻2016”賽果令人振奮,,證明“國(guó)產(chǎn)狗”的技術(shù)已經(jīng)達(dá)到國(guó)際先進(jìn)水平,引來(lái)多方關(guān)注,。
















 602030鋰電池300毫安3.7...
602030鋰電池300毫安3.7... 
















 京公網(wǎng)安備 11011202001879號(hào)
京公網(wǎng)安備 11011202001879號(hào)