





各位讀者,,星船航舶攜“小白龍CSIN-X85”智能救援機器人又來了,。在上一篇,小編介紹了小白龍機器人的性能參數(shù),、產品優(yōu)勢以及實戰(zhàn)應用等情況,,讓讀者對產品有一個比較全面的了解。
今天,,小編從產品實測的角度,,對“小白龍”的控制距離,、防撞、航速,、續(xù)航時間,、拋投高度等重要性能指標一探究竟
控制距離
在進行水域救援的時候,一般肉眼的可視距離在500m以內,,超過500m基本就只能看見一個點,。“小白龍”配備標準控制距離是800m,,當然,,這個距離還會受到周邊實際環(huán)境的影響而有所變化,例如水域周邊有信號發(fā)射塔,,就會對控制距離造成一定影響,。
讓我們看看“小白龍”實測控制距離有多遠:

(操控點位視角)

(達到點位)

(地圖測距)
實測控制距離943m!好吧,,反正小編在第一張圖里是看不到“小白龍”了,,這么遠距離的施救,,需要在“小白龍”身上安裝搭配實時圖傳攝像頭才能工作,,不然就是兩眼一抹黑。
防撞性
在下水執(zhí)行救援任務時,,特別是從岸邊下水,,經常會碰到各類突出的堅硬砂石,設備很容易破損,,會對救援任務造成嚴重后果,。
來看看“小白龍”全速撞擊是什么樣的情況:
(撞擊視頻)
從視頻里可以看到,“小白龍”以5m/s的航速全力撞擊浮筒碼頭,,巨大的沖擊力直接將“小白龍”掀翻,,然后繼續(xù)航行。從這里也可以看到,,配備4個推進器的優(yōu)勢,,設備被意外掀翻后可以繼續(xù)啟動,這是2個推進器做不到的,。
高空拋投
為了適應船舶以及海工平臺等水面高空拋投救援,,產品進行了特殊加固處理,以保證高空拋投救援任務能夠順利進行,。
在實測時,,我們分別針對海事船(5m干舷高度)和海工平臺(10m高度)進行了檢驗:
(拋投視頻)
5m和10m高度拋下后,意猶未盡,,工作人員還想做一個20m的拋投測試,,但苦于20m高度的測試場地實在難找,,就只能放棄了。
續(xù)航測試
好吧,,這是一個漫長又痛苦的測試過程,,畢竟工作人員在碼頭頂著太陽測試2小時,也是要黑好幾圈的,!
“小白龍”設計的最大航速(4m/s)續(xù)航時間≥20min,,巡航航速(2m/s)續(xù)航時間≥45min,讓我們來看看實測情況,,小編截取了1分半的測試視頻:
(續(xù)航視頻)
實測最大航速續(xù)航時間33分26秒,,巡航速度巡航時間51分19秒,完全超過設計值,。
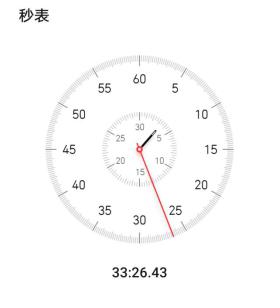
(最大航速續(xù)航時間)
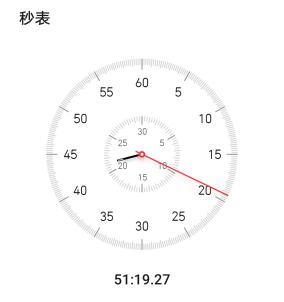
(巡航航速續(xù)航時間)
下文預告
本期關于小白龍的性能“測試篇”就暫時講這里,,下期將重點介紹“小白龍”的手機APP控制終端,敬請期待,!
最后,,為各位讀者呈上星船航舶產品的視頻錦集:
單位:廣州星航船舶科技有限公司
聯(lián)系人:杜經理 15623324430(微信同號)
















 602030鋰電池300毫安3.7...
602030鋰電池300毫安3.7... 
















 京公網(wǎng)安備 11011202001879號
京公網(wǎng)安備 11011202001879號