一,、應(yīng)用背景:
北京宇能瑞達(dá)科技有限公司精心研制的低空慢速小目標(biāo)防御系統(tǒng)車載式是為了應(yīng)對(duì)重要賽事、突發(fā)事件,、大型活動(dòng)安保、邊防巡邏等方面,,經(jīng)常需要應(yīng)對(duì)危險(xiǎn)的低空慢速小目標(biāo)的攔截和防御,車載式反無人機(jī)系統(tǒng)應(yīng)運(yùn)而生,。
二、系統(tǒng)架構(gòu)部署:
車載式應(yīng)急防御指揮車主要包括以下幾部分:
1,、 目標(biāo)探測(cè)系統(tǒng):
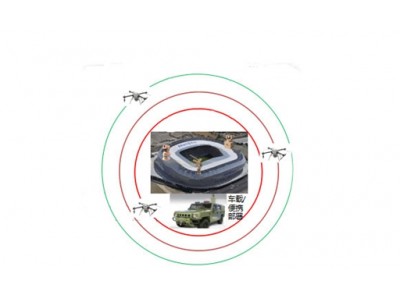
目標(biāo)探測(cè)系統(tǒng)經(jīng)過改裝的車輛頂部預(yù)置多種對(duì)慢速小目標(biāo)的探測(cè)系統(tǒng),,可以跟隨目標(biāo)移動(dòng)過程中實(shí)施探測(cè),探測(cè)距離以探測(cè)器為圓心,,3Km為半徑的區(qū)域內(nèi)進(jìn)行全向目標(biāo)搜索。
2,、 光電跟蹤系統(tǒng):
光電跟蹤系統(tǒng)與目標(biāo)探測(cè)系統(tǒng)集成在同一模塊的光電跟蹤系統(tǒng),可以跟隨探測(cè)器保持高速運(yùn)動(dòng)狀態(tài)下的目標(biāo)跟蹤,,通過復(fù)雜的數(shù)學(xué)建模方法,確保跟蹤無人機(jī)的運(yùn)動(dòng)飛行軌跡,。
3、 電磁壓制系統(tǒng):
電磁壓制系統(tǒng)可以在運(yùn)動(dòng)狀態(tài)下鎖定和攻擊目標(biāo),,切斷小型無人機(jī)與GPS衛(wèi)星信號(hào),與遙控器的通信信號(hào)和圖傳信號(hào)的通信連接,,將無人機(jī)平穩(wěn)壓制降落或讓其反航。
4,、 追蹤朔源系統(tǒng):
車載系統(tǒng)內(nèi)部經(jīng)過數(shù)據(jù)處理后,可準(zhǔn)確定位無人機(jī)操控者的具體方位坐標(biāo),,為地面安保人員實(shí)施抓捕提供充分的技術(shù)條件和信息保障,。

(圖1)車載式反無人機(jī)系統(tǒng)示意圖
三、產(chǎn)品部署:
北京宇能瑞達(dá)科技有限公司精心研制的車載式反無人機(jī)系統(tǒng),,廣泛部署于應(yīng)急,,邊防、反恐等區(qū)域,,特別是適合于大型的會(huì)議安保與保障,國家領(lǐng)導(dǎo)人出訪,,重大體育賽事等活動(dòng)場(chǎng)所,。確保目標(biāo)廣場(chǎng)或目標(biāo)范圍的安全周界內(nèi)安全可控。為大型賽事安保提供充分的技術(shù)保障手段,。
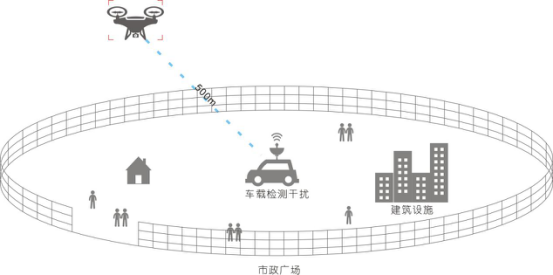
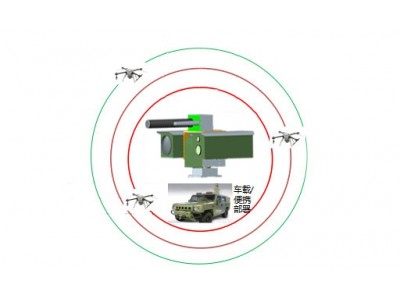
(圖2)典型單點(diǎn)移動(dòng)式部署方案示意圖
四,、產(chǎn)品參數(shù):
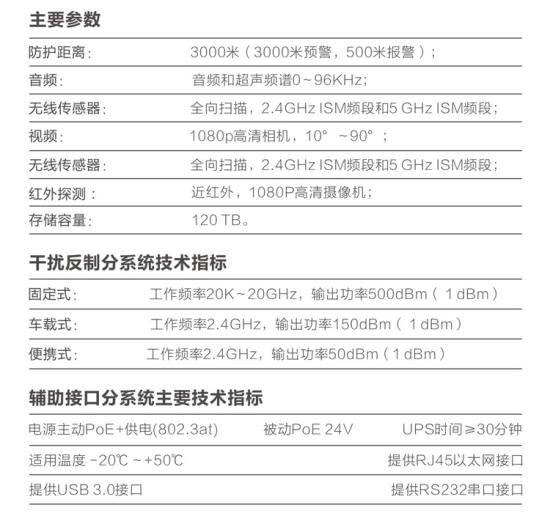
(圖3)產(chǎn)品參數(shù)(受前期參數(shù)統(tǒng)計(jì)整理影響,,參數(shù)配置可能有出入之處)
5、車載規(guī)格:
北京宇能瑞達(dá)科技有限公司精心研制的車載式反無人機(jī)系統(tǒng),,針對(duì)不同的用戶使用環(huán)境提供多種版本的車載式改裝方案,前期的改裝方案主要為依維柯和普拉多,,可以確保用戶在各種復(fù)雜地理、地形,、氣候條件下能夠正常使用和運(yùn)行,,確保內(nèi)部的數(shù)據(jù)控制系統(tǒng)能夠正常的通信。
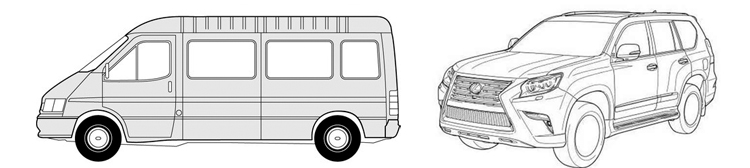
(圖4)車輛外形圖
北京宇能瑞達(dá)科技有限公司精心研制的低空慢速小目標(biāo)防御系統(tǒng)車載式是為了應(yīng)對(duì)重要賽事,、突發(fā)事件,、大型活動(dòng)安保、邊防巡邏等方面,,經(jīng)常需要應(yīng)對(duì)危險(xiǎn)的低空慢速小目標(biāo)的攔截和防御,,車載式反無人機(jī)系統(tǒng)應(yīng)運(yùn)而生。









擊交談/留言")




 京公網(wǎng)安備 11011202001879號(hào)
京公網(wǎng)安備 11011202001879號(hào) 
 首頁
首頁




